電動アシスト自転車の開発PJ(11)
「リニア誘導モータ方式」の検討
今回はホイールを2次導体と見立てて、両側式リニア誘導モータでホイールを直接駆動する方式について、実現性を検討する。低速のリニア誘導 モータは地下鉄の駆動モータとしてすでに実用化されている。効率は通常の回転モータ駆動に比べて劣るが、登坂性能が優れ、車両の高さを低く設計できることから、特に地下鉄用として重宝されている。(トンネルの掘削断面が小さくできるメリットが全体の工事費低減に大きく効いてくる)地下鉄の低速リニア誘導モータは、同期速度が42.5Km/h、最高速度70.Km/h程度と比較的低速であり、この技術は同じような速度域で使われる自転車への適応性が十分に考えられる。

実際にリニア誘導モータを設計をするとなると、電磁誘導理論の領域に深く入り込む必要があり、アマチュアにとってかなりハードルが高い。海外論文を中心に色々調査した結果、実用的な設計手順を示すものを見つけけることが出来た。この分野は、今だに電磁気学の研究対象となるほど、理論・計算方法が確立していないらしく、学術的な論文が多数出回っている。(昔は九大、東大などの日本人の論文が多かったが、現在では中国人の論文が圧倒的である。・・・先進国は本研究に興味を失った?)
最終的に下記論文を今回の試設計の参考文献として採用した。計算はコンピュータプログラムで解く必要があるが、論文に添付されていたMATLABのプログラムをEXCELのVBAに変換して計算した。(論文のプログラムには誤りもある。まともに計算できるまで約3ヶ月を要した。計算式の理解も難解で苦労した。)
「参考文献」
1)Mihir Mehta, et al. "A Design of Double Sided Linear Induction Motor for Efficient Performance for Low Speed Application" International Journal For Technological Research In Engineering Volume 2, Issue 9. May,2015
2)SARVESWARA PRASAD BHAMIDI ”DESIGN OF A SINGLE SIDED LINEAR INDUCTION MOTOR (SLIM) USING A USER INTERACTIVE COMPUTER PROGRAM” presented to the faculty of the Graduate School University of Missouri-Columbia, May, 2005
自転車の目標速度、推進力、電圧、ポール数などを仮定して、計算のパラメータを色々変えて重量、効率、推力などが妥当な値となる最適な解を繰り返し計算で求める。
「計算条件」
下図は最終的に計算で得られた「リニア誘導モータ」の諸元である。



 |
後輪最大駆動力=40*32/34/0.672*2=112N 重量=1.5Kg 効率=79%
「市販の部品の組み合わせで出来るのが魅力、ただし、専業メーカの製品に比べれば完成度は劣る。候補のなかで実現性は一番高い。」
B)
アキシアルフラックスコアレスモータ; ディスクブレーキロータ直接駆動
前輪最大駆動力=6.35/0.672*2=18.9N 重量=1.0Kg 効率=78%
「高効率でスマートなモータであるが、製作はかなり苦労しそう。ホイール直接駆動の場合はトルクが細すぎる。苦労する割には成果に乏しいか?」
C)
リニア誘導モータ方式; 両側式リニアモータ+アルミ盤ホイール駆動
後輪最大駆動力=90N 重量=1.5Kg 効率=70%
「トルクはほぼ満足できるレベルである。重量はもう少し工夫の余地あり。電動アシスト用として、トルク特性はマッチする。計算と実機の性能差、巻線、2次ロータ盤形状の最適化については実験的に詰める必要がある。2次導体として使用するアルミ盤はエアロリムの延長として設計すれば面白いと思う。
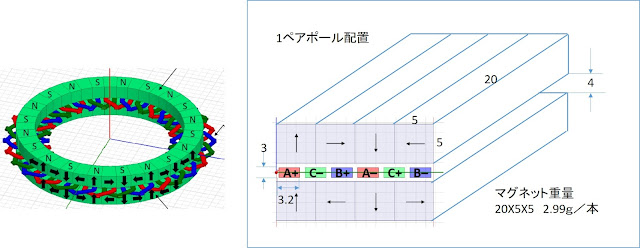
B’) コアレス同期リニア方式; 永久磁石固定、ホイールにコアレスコイル配置
後輪最大駆動力=30/0.672*2=89N 重量=1.2Kg 効率=90%
トルク(駆動力)、重量、効率のすべての面でポテンシャルが高い。B)の磁石とコイルを逆にして、磁石を周方向に部分的に切り取った型式である。コアレス同期リニア方式とも言える。(リニアモータの世界では結構ポピュラーな方式である)問題は電源供給のスリップリング効率とコイルへの通電制御方式の確立。詳細計画の価値あり。磁石はやはりハルバッハ配列を採用。


コメント
コメントを投稿